Learning cognitive maps for vicarious evaluation
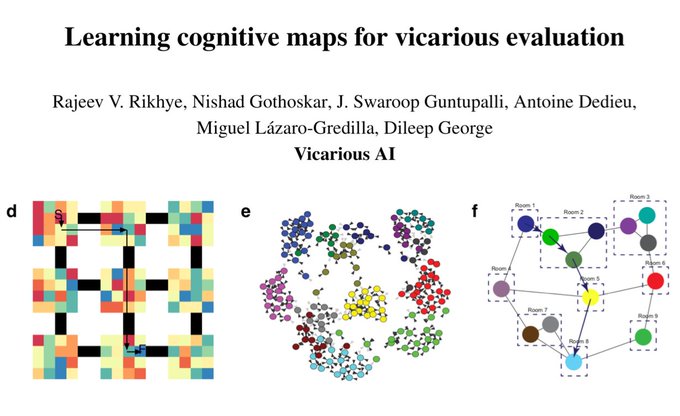 Image credit: Unsplash
Image credit: Unsplash
Abstract
Cognitive maps enable us to learn the layout of environments, encode and retrieve episodic memories, and navigate vicariously for mental evaluation of options. A unifying model of cognitive maps will need to explain how the maps can be learned scalably with sensory observations that are non-unique over multiple spatial locations (aliased), retrieved efficiently in the face of uncertainty, and form the fabric of efficient hierarchical planning. We propose learning higher-order graphs – structured in a specific way that allows efficient learning, hierarchy formation, and inference – as the general principle that connects these different desiderata. We show that these graphs can be learned efficiently from experienced sequences using a cloned Hidden Markov Model (CHMM), and uncertainty-aware planning can be achieved using message-passing inference. Using diverse experimental settings, we show that CHMMs can be used to explain the emergence of context-specific representations, formation of transferable structural knowledge, transitive inference, shortcut finding in novel spaces, remapping of place cells, and hierarchical planning. Structured higher-order graph learning and probabilistic inference might provide a simple unifying framework for understanding hippocampal function, and a pathway for relational abstractions in artificial intelligence.
Supplementary notes can be added here, including code and math.
Dileep George
AGI Research at DeepMind
My research interests include distributed robotics, mobile computing and programmable matter.